結果
マイクロマウス競技のファイナルにエントリーしました。初めて32 x 32の迷路を完走できて最短走行も決めることができました。
| 競技 | ロボット名 | 記録 | 順位 |
| マイクロマウス競技ファイナル | trrkuwaganon | 00:15.100 | 7位 |
振り返り
1走目の全面探索途中でコケてしまい2走目でとりあえずゴールまで行き余計な探索をしない走行をしたため、最速タイムが出る経路は選択できませんでしたが、まずまずのタイムが出る経路は出ていたという感じでした。
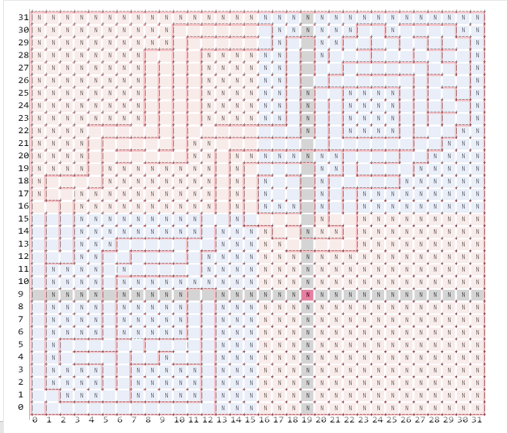
競技終了後に全面探索が成功していた場合の経路で最短走行のシミュレーションをしてみたら1秒ちょっと早くなるみたいでした。やっぱり全面探索の成功は重要だとあらためて感じました。
色々なターン速度、加速度でシミュレーションしてみたら北周りの経路の方が早いみたい。加速度が4m/s^2、最高速が2.0m/sくらいの条件にしても北周りが最速経路になるし、優勝争いをしている人たちくらいのパラメータ設定(Fantom2nd)でも北周りが最速っぽい。 pic.twitter.com/V6kYwex7Hx
— R.Ganon (@qtfdl94q) March 14, 2022
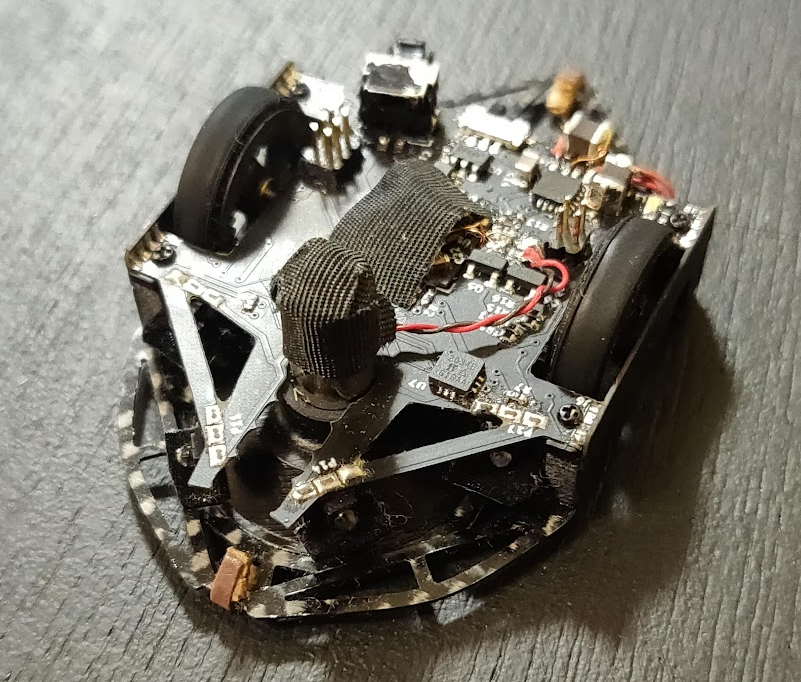
ロボットの特徴
CFRPによる高剛性かつ軽量なシャシー
CNCでCFRPを切削したものをメタルロックで張り合わせた構造のシャシーを採用しました。くれぐれも切削時の粉塵には気をつけましょう。
サイクロン式吸着機構
吸引用のスカートが必要なく構造が単純なサイクロン式吸着機構を採用しました。6mm径のモーターを全力で回して24g程の吸引力=機体重量の2倍くらいを発生することはできていました。

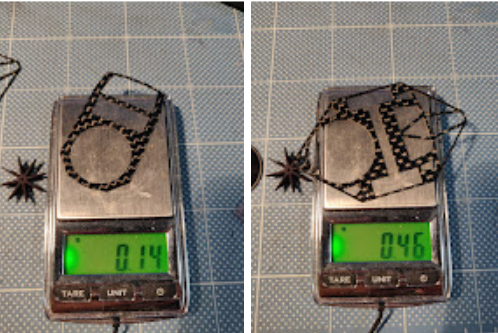
なるべく軽量かつ丈夫に作るためにDMM.makeの3Dプリントで作成した軸パーツにCNCで切削した0.2mm厚のCFRPの羽を刺し組む構造としています。羽の枚数は色々試しましたが5枚が最も効率が良かったです。

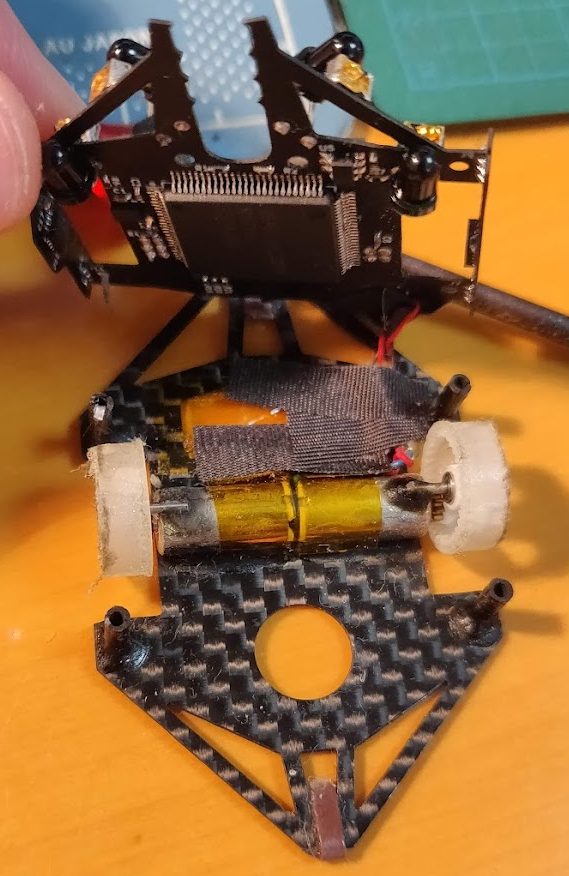
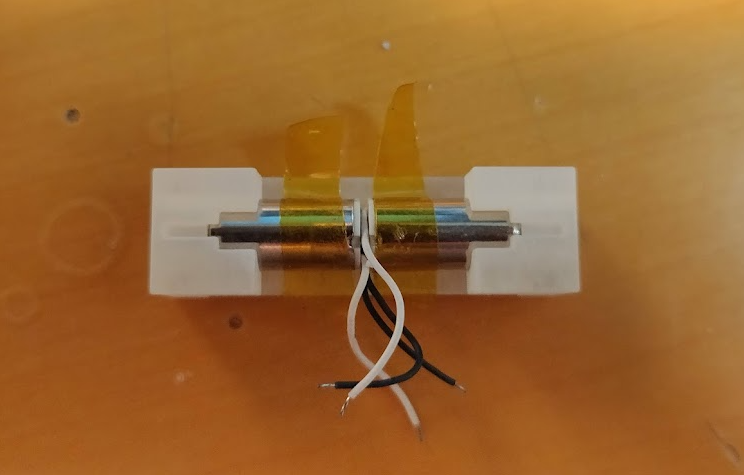
内歯車によるモーターの中心配置
モーターの上にシャフトを接着してそこに内歯車のホイールを差し込む構造としています。この配置で転移歯車を使わずギアがかみ合うピニオンと内歯車の歯数を奇跡的に発見できたため採用しました。
軸の位置決めはこんな感じの3Dプリント品の治具を使っています。
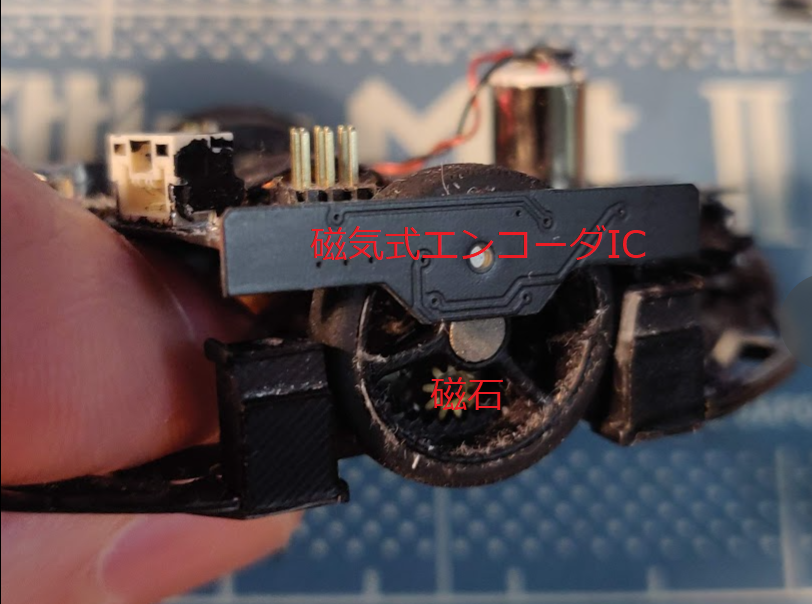
エンコーダのホイール横配置
メイン基板と磁気式エンコーダ基板をはんだで接合してホイールの側面の磁石の前に磁気式エンコーダICが来るような配置になっています。この配置の意図は磁石とモーターの距離を十分に離すことで磁気干渉を防ぐことです。
シャシーとメイン基板の間のパーツに位置決め用の溝を作っていたので磁石とエンコーダICのずれも少なく作ることができました。このパーツもDMM.makeの3Dプリント品です。
さいごに
やっぱりリアル大会のモチベーション維持への効果の高さを痛感した1年でした。大会関係者の皆様には感謝の言葉しかありません。
大会からちょうど2か月後のブログ更新となってしまいました。2か月もあったので2022年大会用の新作も組みあがってしまいました。
新作を2台建造した。 pic.twitter.com/sEPxR32BnF
— R.Ganon (@qtfdl94q) May 10, 2022
良好な吸引力。 pic.twitter.com/JICbRqRvzo
— R.Ganon (@qtfdl94q) May 11, 2022